西门子PID调节器主要部分的作用
来源:电工天下时间:2015-10-20 09:07:58 作者:老电工手机版>>
西门子PID调节器主要部分的作用
PID是比例,积分,微分的缩写。
1、比例调节的作用:是按比例反应系统的偏差,系统一旦出现了偏差,比例调节立即产生调节作用用以减少偏差。比例作用大,可以加快调节,减少误差,但是过大的比例,使系统的稳定性下降,甚至造成系统的不稳定。
2、积分调节的作用:是使系统消除稳态误差,提高无差度。因为有误差,积分调节就进行,直至无差,积分调节停止,积分调节输出一常值。积分作用的强弱取决与积分时间常数Ti,Ti越小,积分作用就越强。反之Ti大则积分作用弱,加入积分调节可使系统稳定性下降,动态响应变慢。积分作用常与另两种调节规律结合,组成PI调节器或PID调节器。
3、微分调节的作用:微分作用反映系统偏差信号的变化率,具有预见性,能预见偏差变化的趋势,因此能产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除。因此,可以改善系统的动态性能。
在微分时间选择合适情况下,可以减少超调,减少调节时间。微分作用对噪声干扰有放大作用,因此过强的加微分调节,对系统抗干扰不利。此外,微分反应的是变化率,而当输入没有变化时,微分作用输出为零。微分作用不能单独使用,需要与另外两种调节规律相结合,组成PD或PID控制器。
比例(P)、积分(I)、微分(D)控制算法各自作用:
比例,反应系统的基本(当前)偏差,系数大,可以加快调节,减小误差,但过大的比例使系统稳定性下降,甚至造成系统不稳定;
积分,反应系统的累计偏差 ,使系统消除稳态误差,提高无差度,因为有误差,积分调节就进行,直至无误差;
微分,反映系统偏差信号的变化率,具有预见性,能预见偏差变化的趋势,产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除,因此可以改善系统的动态性能。但是微分对噪声干扰有放大作用,加强微分对系统抗干扰不利。
积分和微分都不能单独起作用,必须与比例控制配合。
比例控制的优点是简单而且调整方便,但它会产生余差。余差的大小随比例系数的增大而减小。比例控制适用于低阶过程,对于一个具有较大时间常数的过程,因为过程的稳定裕度大,往往允许有很大的开环增益(即比例系数)。
另外,对于具有积分环节的对象,适用比例控制器不会产生余差,而采用PI控制器却会使系统的稳定性严重恶化,因此具有积分环节的对象特别适用比例控制器。
积分控制作用可以消除余差,但因积分作用是随着时间累积而逐渐加强,所以控制作用缓慢,在时间上总是落后于偏差信号的变化,不能及时控制。当对象的惯性较大时,被控参数将出现较大的超调量,控制时间也较长,严重时甚至使系统难以稳定。
因此,积分控制不宜单独使用,往往是将比例和积分组合起来,构成比例积分PI控制器,这样控制即及时,又能消除余差。
微分作用通过提供超前作用使得被控过程趋于稳定,因此它常用来抵消积分作用带来的不稳定趋势。(电工技术之家 www.dgjs123.com)同时微分作用也能减小过渡过程时间,从而改善被控变量的动态响应。但是微分作用的输出只与偏差信号的变化速率有关,如果有偏差但不变化,则微分输出为零,故微分控制不能消除余差。所以微分控制器不能单独使用,它常与比例或比例积分控制作用组合,构成PD或PID控制器。
-- 分隔线 --
PID调节中比例如何设置?
首先,需要确认pid表控制什么的,用来控制蒸汽薄膜阀动作来控制温度的,而且一般表都有pid 自诊定,表自身能计算出适合的pid 值。
我的经验:p值最重要,一般p值越小,控制的动作反应越快,I 值和D 值只是帮助控制的效果更好。
在设备的一个经验值里,P=3,I=60,D=90。很多的控制也都是慢慢试验出来的pid 值。因为各种应用场合千差万别,不好根据公式计算出pid 值。
PID控制方式的具体流程是计算误差和温度的变化速度进行PID计算,先以P参数和误差计算出基础输出量,在根据误差的累积值和I参数计算出修正量,最终找出控制点和温度设定点之间的平衡状态,最后在通过温度的变化速率与D参数控制温度的变化速度以防止温度的剧烈变化。
进行整定时先进行P调节,使I和D作用无效,观察温度变化曲线,若变化曲线多次出现波形则应该放大比例(P)参数,若变化曲线非常平缓,则应该缩小比例(P)参数。比例(P)参数设定好后,设定积分(I)参数,积分(I)正好与P参数相反,曲线平缓则需要放大积分(I),出现多次波形则需要缩小积分(I)。比例(P)和积分(I)都设定好以后设定微分(D)参数,微分(D)参数与比例(P)参数的设定方法是一样的。
相关文章西门子plc上升沿与下降沿的作用及编程方法

西门子plc上升沿与下降沿的作用及编程方法,西门子plc上升沿与下降沿的作用及编程方法,以及上升沿和下降沿的主要作用说明。
时间:2022-09-20 19:49:42
【图解】西门子s7-200的pid回路指令

有关西门子s7-200的pid回路指令,PID运算通过PID回路指令来实现,其指令格式如图,EN为PID指令输入信号,TBL为PID回路表的起始地址,一起来了解下。
时间:2020-04-08 11:45:44
【图】西门子S7-200的PID回路指令的用法
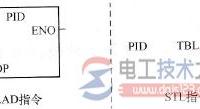
西门子S7-200的PID回路指令的用法,PID运算通过PID回路指令来实现,其指令格式如图,EN为PID指令输入信号,TBL为PID回路表的起始地址,LOOP为PID控制回路号。
时间:2020-03-10 11:18:54
西门子S7-200PLC PID向导量程设定方法
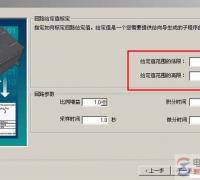
有关西门子S7-200PLC PID向导量程的设定方法,在回路表中是需要将设定值,反馈值都转换为0.0-1.0之间的实数,反馈值的量程范围要根据所使用的模块来确定。
时间:2015-12-12 19:32:05
【图】西门子step7符号表的结构与作用
西门子step7符号表的结构与作用,包括step7符号表的状态、符号、地址与数据类型等,以及西门子step7符号表的错误信息。
时间:2015-11-29 08:21:20
如何设置西门子s7-300 pid功能块fb41的积分时间?
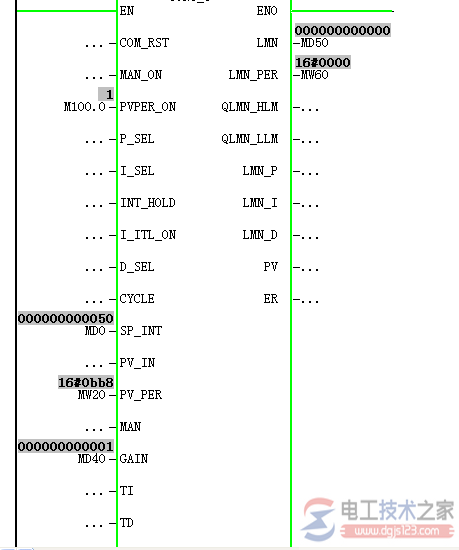
西门子s7-300 pid功能块fb41的积分时间设置问题,设置为地址时必须是双字地址,若用触摸屏设置积分时间为1000ms,需要向双字写入1000。
时间:2015-10-19 15:34:09
西门子s7-300 fb41 pid调试记录
西门子s7-300 fb41 pid调试记录,包括.kp的确定、.Ti的确定、kp Ti Td的参数位置设置等,fb41的比例系数Kp单位%,积分时间Ti单位ms,微分时间Td单位ms。
时间:2015-10-19 10:23:20
西门子plc pid控制调节的使用方法

西门子plc pid控制调节的使用方法,要做好pid调节,需要了解pid的计算公式和pid参数的意义,pid公式的前3项分别与误差、误差的积分和误差的导数成正比,pid参数调整的口诀,大家可以看看。
时间:2015-09-24 09:27:38