电机旋转一周的脉冲数计算方法
来源:电工天下时间:2020-01-14 09:18:12 作者:老电工手机版>>
有关电机旋转一周的脉冲数计算方法,电机旋转一周的"脉冲"的概念,三相交流电变化一周有6个脉冲,移动距离的概念,编码器的分辨率,工件移动的分辨率或者精度等。
电机脉冲数计算方法
1、电机旋转脉冲的概念
1)电机旋转一周的"脉冲"是什么?
2)电脉冲,是电机的电源脉冲,把交流电的正、负半周看成两个脉冲,那么三相交流电变化一周有6个脉冲;
3)那么极对数为P的交流电机转一周需要6P个脉冲;
4)当然这是三相交流电机的算法,直流电机或者其他转动原理不同的电机,只是脉冲的计算式不同而已;
2、"移动距离"是什么
1)如果移动距离指的是,电机转动一周,被驱动的工件平移的距离;
2)那么一个电源脉冲,对应电机前进一步,被驱动的工件平移的距离叫步距;
3)例如电机与被驱动的工件之间是螺杆传动,电机的转速与螺杆的转速比叫机械传动比,螺距就是螺杆转动一周工件的平移距离;
4)如果螺距是1mm,传动比是1:1,那么电机转一周,工件平移1mm;
如果螺距是1mm,传动比是10:1,那么电机转一周,工件平移0.1mm;
如果螺距是1mm,传动比是100:1,那么电机转一周,工件平移0.01mm;
如果螺距是1mm,传动比是1000:1,那么电机转一周,工件平移0.001mm;
5)如果电机的电机转一周需要6P个脉冲,那么每个脉冲即电机的每一个步进,工件移动的距离就是一个步距,那么
步距= 螺距/传动比X6P
3、编码器的分辨率
1)编码器是检测电机转子角位移的设备;
2)编码器与转子同轴;
3)电机每输入6P个脉冲,转一周角位移为360度(2π弧度),编码器应该输出6P个脉冲,1个脉冲对应的角位移是360度/6P;
4)我的这个编码器每转一周只输出6P个脉冲;
5)如果一个编码器有6000P条刻线,没转一周,输出6000P个脉冲,那么每1000P个脉冲对应的角位移是360度/6P,对应工件位移一个步距;
6)编码器的刻线多没有什么用处;
7)因为只能准确到电机的每一个脉冲转过的角度,不可能准确到几分之几个脉冲的角度,几分之几个脉冲无实际意义,只是个数学概念;
8)如果把编码器的分辨率定义为每一个刻线对应的角位移,那么6000P条刻线的编码器的分辨率是360度/6000P;
9)这个分辨率的高低对电机的角位移的测量毫无意义;
10)我们要检测的是电机转过几步,工件移动几个步距,虽然几分之几的步距数学概念有,而实际控制不了;
4、工件移动的分辨率或精度
1)工件移动的步距就是我们电机(或者伺服)控制的分辨率或者精度;
2)由于步距= 螺距/传动比X6P,所以提高电机(或者伺服)控制的分辨率或者精度的方法是提高传动比;
3)例如:如果螺距是1mm,传动比是1000:1,那么电机转一周,工件平移0.001mm,步距是 0.001/6p mm,控制精度就是0.001/6p mm;
5、建议编码器与电机匹配,可以简化控制计算的数字非常整齐;电工:www.dgjs123.com
6、由于电机的极对数P大多数是1、2、3、4、5、6,所以编码器的刻线是2X2X3X2X3X2X5=720的整数倍,就可以通用;
7、为了检测方向,可以有两套互差90度电工角的刻线,以判断转向;
8、这样,对于P=1的电机,两套刻线的基点互差180条刻线而重和,这样从基点到左侧180条刻线为正转,那么从基点到右侧180条刻线为反转;
9、实际还是720条刻线;
10、这样,对于P=6的电机,两套刻线的基点互差30条刻线而重和,这样从基点到左侧30条刻线为正转,那么从基点到右侧30条刻线为反转;
11、所以刻线得多少,不是精确度的问题,而是能否使一个步距对应的刻线条数是整数个,保证能精确记数的问题;
12、由于电机的极对数P是1、2、3、4、5、6、7、8、9、10,所以编码器的刻线是2X2X3X2X3X2X5X7X2X3=30240的整数倍,就可以通用,但是刻线太多,工艺难以实现;
13、对于电机的极对数P是1、2、7、8、9编码器的刻线是2X2X3X2X7X4X9=6048的整数倍,就可以通用;
14、这样,对于P=1的电机,两套刻线的基点互差1512条刻线而重和,这样从基点到左侧1512条刻线为正转,那么从基点到右侧1512条刻线为反转;
15、这样,对于P=9的电机,两套刻线的基点互差168条刻线而重和,这样从基点到左侧168条刻线为正转,那么从基点到右侧168条刻线为反转;
16、对于电机的极对数P是1、2、8、9、10编码器的刻线是2X2X3X2X4X9X5=4320的整数倍,就可以通用;
17、这样,对于P=1的电机,两套刻线的基点互差1080条刻线而重和,这样从基点到左侧1080条刻线为正转,那么从基点到右侧1080条刻线为反转;
18、这样,对于P=10的电机,两套刻线的基点互差108条刻线而重和,这样从基点到左侧108条刻线为正转,那么从基点到右侧108条刻线为反转;
19、如果要给一个P是1、2、3、4、6、8、11、12的电机配用编码器,则这个编码器的刻线应该是2X2X3X2X3X2X2X11X2=6336的整数倍,就可以通用;
20、这样,对于P=1的电机,两套刻线的基点互差1584条刻线而重和,这样从基点到左侧1584条刻线为正转,那么从基点到右侧1584条刻线为反转;
21、这样,对于P=12的电机,两套刻线的基点互差132条刻线而重和,这样从基点到左侧132条刻线为正转,那么从基点到右侧132条刻线为反转;
22、如果要给一个P是1、2、3、4、6、8、9、10、12的电机配用编码器,则这个编码器的刻线应该是2X2X3X2X3X2X2X3X5X2=8640的整数倍,就可以通用;
23、从以上分析得出编码器的刻线与电机的极对数相关,一种编码器的刻线适应一种极对数的电机,适应多个不同极对数的电机的编码器的刻线增多,在有限刻线下,一种编码器不可能适应所有极对数的电机;
24、如果你的电机的极对数确定,可以尽量选择适合的刻线少的编码器,反而计算要简单,并不影响检测、反馈的精确度和分辨率。
相关文章三相异步电动机额定功率的计算方法
有关三相异步电动机额定功率的计算方法,额定功率是指电动机在额定运行时轴上输出的功率,不等于从电源吸收的功率。
时间:2022-09-14 11:04:15
如何计算电动机星形接法与三角形接法额定电流?

有关电动机星形接法与三角形接法额定电流的计算公式,电机作星形连接时,或电机作三角形连接时时额定电流的计算方法,电机从星形接成三角形,功率的提高问题。
时间:2022-09-14 10:41:15
电动机的启动电流如何计算,电动机启动电流计算公式
有关电动机启动电流的计算方法,三相电机启动电流瞬时是正常的多少倍,电动机的启动电流是额定电流的多少,电动机启动电流计算公式与实例,感兴趣的朋友参考下。
时间:2022-08-12 11:23:43
潜水泵怎么计算扬程功率?

问题描述:高低是60米,距离是3000米,用水量是20方,潜水泵应该选多大扬程?多大的电机?正确答案:水泵的扬程是指从水面至岀水口的垂直高度,如果垂直高度60米,距离3000米,岀水口径10吋,初步估算一下,最起码电机功率要在50Kw以上。
时间:2022-05-12 16:10:00
电动机星三角启动时间的计算方法
电动机星三角启动时转换的延时时间,并没有确定的计算公式,可以通过查看负载的类型和大小来定。一般情况下,被拖动的设备的直径越大,转动惯量越大,质量越大,需要的启动转换时间就会越长。
时间:2022-01-18 06:09:14
异步电机转差率的计算公式

异步电机转差率公式,n与n1之间总是存在差异,n1与n的差值称为转差,用Δn表示,即Δn=n1—n。把转差Δn与同步转速n1的比值称为转差率或滑差,用s表示。
时间:2021-12-28 10:07:00
软启动器起动时间怎么计算?
怎么计算软启动器的启动时间,电力拖动系统转动公式:M-ML=J×dΩ/dt(1)式中:M为电机力矩;ML为负载力矩;J为系统转动惯量;dΩ/dt为角转速的变化率,其中Ω=2,πn/60=(1/9.55)n,n为线速度。
时间:2021-12-28 10:01:39
电机扭矩和转速关系,电机扭矩的计算公式
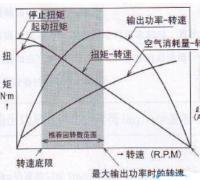
有关电机的知识,介绍了电机扭矩和转速的关系,如果通过减速机计算扭矩,则应考虑齿轮传动效率损失的因素,此外还介绍了电机扭矩计算公式,一起来看下。
时间:2021-12-11 09:08:17
- 上一篇:电动机星三角启动的原理图与接线图
- 下一篇:三相绕线转子电动机的控制电路操作顺序