角度传感器的工作原理_角度传感器的校准测量方法
来源:电工天下时间:2020-04-27 10:33:23 作者:老电工手机版>>
有关角度传感器的工作原理,以及角度传感器的校准测量方法,压差归零式角度传感器外形结构,风标对向式角度传感器外形结构,角度传感器的校准项目与方法,以及数据处理与校验结果的标准。
角度传感器工作原理及校准测量方法
压差归零式和风标对向式角度在低速风洞中的校准方法、项目、数据处理和主要结果。安装在飞机或导弹表面的角度传感器,由于受到飞行器本体的干扰,传感器感受到的是被弯曲了的局部气流方向,因而人们不能直接获得飞行器真实角度。
为了确定被弯曲了的气流方向与飞行器真实角度之间的关系,需要进行风洞校准测量。
校准结果表明,角度传感器输出信号随飞行器角度变化具有良好的线性关系,校准数据稳定、可靠,且重复性令人满意。
目前,飞行器上使用比较普遍的是压差归零式和风标对向式两种角度传感器。
压差归零式角度传感器外形结构见图1,其工作原理是利用压差归零特性。传感器由一个电位计和一个随时跟踪气流转动的测压探头构成,测压探头上开有两排气槽,气流由气槽通过两个通道作用到内部两对相反的叶面上,产生一个与气流方向相反的反馈力矩,使探头追随气流转动至两排气槽压力相等,即压差为零的初始位置,此时与探头同轴连接的电刷在电位计上产生角位移,输出与气流方向变化成正比的电信号。
风标对向式角度传感器外形结构见图2,工作原理是利用风标对气流的对向特性。传感器包括一个电位计和一个随时跟踪气流转动的方向风标。当飞行器姿态角变化时,风标相对气流方向随之变化,产生一个与飞行器角度变化相反的角位移。风标转轴与电位计同轴连接,因此,风标转动角度与电位计输出电压信号成正比,由此可以确定角度传感器感受到的气流方向与飞行器实际角度的对应关系。安装在飞行器左侧用于测量飞行迎角的传感器称为迎角传感器;安装在飞行器正上方用于测量飞行侧滑角的称为侧滑角度传感器。
1、试验设备
传感器校准实验是在航天科技集团公司笫701研究所低速风洞中进行的。该座风洞试验段尺寸为3m?3m?12m,试验风速在10~100m/s之间无级调速。风洞备有计算机控制的多自由度变角度系统,可以方便地模拟飞行器不同迎角、侧滑角状态,并且实时处理测试数据和绘制曲线。
2、校准项目与方法
1、校准项目
校准项目主要包括两部分,首先在地面进行的静校,以及随后在风洞中进行的动校。前者是确定传感器系数以及非线性、迟滞、重复性、综合精度等产品性能参数,后者是确定角度传感器与飞行器实际角度之间关系,其中包括飞行器不同姿态角,如迎角、侧滑角、滚转角等对传感器校准的影响。同时还可确定不同试验风速和传感器安装位置对传感器校准的影响,并通过风洞试验达到优选传感器安装位置的目的。
2、校准方法
传感器静校是属于常规方法,它的性能参数通常在产品使用说明书中提供。本文着重介绍在风洞中动校方法及其结果。
首先把飞行器安装在风洞支撑机构上,将飞行器姿态角(如迎角、侧滑角、滚转角等)都调整到零度,误差在3′以内。
在飞行器左侧为迎角传感器,在飞行器正上方为侧滑角度传感器。传感器转轴要垂直飞行器表面,且传感器底座表面与飞行器表面外形保持一致,不能有突起或凹坑。
传感器不要安装在表面曲率变化大的机头(或弹头)处,应在机身(或弹身)平直段前部位置。图3、图4是安装在弹体上的角度传感器在风洞中的校准照片。
3、数据处理
迎角传感器和侧滑角传感器数据处理方法是相同的,下面以迎角传感器为例说明。在进行风洞校准时,可以得到飞行器真实迎角at与传感器输出电压Ua的对应关系,即:at=F(Ua)
用反函数表示:Ua=F-1(at)
传感器角位移as与输出电压Ua关系式由静校时确定:as=f(Ua),
则传感器角位移与飞行器真实迎角关系式为∶as=f(F-1(at))=F(at)。
校测表明,在一定角度范围内,函数f(x)和F(x)都是线性函数,因而函数F(x)也必定成线性规律变化,于是可以用直线方程来表示∶
as=Kaat+a0 (1)
根据传感器静校实验得:as=Wa(Ua-Ua0) (2)
4、校测结果
1、风速影响
风洞校准试验风速V为50m/s和85m/s,在某一导弹上测量结果见表1。可以看到,试验风速对角度传感器校准无影响。
表1 风速影响

2、侧滑角的影响
不同侧滑角对迎角传感器的影响见表2。从表中可以看到,随侧滑角增加,迎角传感器校准曲线斜率Ka呈现递增趋势,但变化量很小。
表2 侧滑角对迎角传感器的影响

3、迎角的影响
迎角不同时对侧滑角传感器的影响见表3。从表中可以看到,随迎角增加,侧滑角传感器校准曲线斜率Kb呈现递增变化规律,但变化量不大。
表3 迎角对侧滑角传感器的影响

4、安装角影响
在某一飞行器上进行测量,安装角q分别为0°、5°、10°三种状态,结果见表4。从表中可以看到,随安装角增加,校准拟合直线斜率Ka、Kb均呈增加趋势。根据多次重复测量表明,q=0° 时,数据最稳定,特别是截距基本保持不变。因此安装角q=0°是最佳方案。
表4 安装角影响

5、安装位置影响
把传感器从弹身前部平直段前移到头部锥段。在不同侧滑角时迎角传感器的校准结果见表5和图5。在不同迎角时侧滑角度传感器校准结果见表6。
表5 侧滑角对迎角传感器的影响(在圆锥段)

表6 迎角对侧滑度度传感器的影响(在圆锥段)

根据表5、表6校准结果表明,角度传感器不宜安装在曲率变化较大的飞行器圆锥段头部,否则,在不同姿态角下,校准直线斜率和截距均发生很大变化。
5、结论
(1)无论是压差式角度传感器或风标式角度传感器,在一定角度范围内,角位移与输出电压具有良好线性。
(2)动校表明,传感器性能稳定,数据可靠,校准直线斜率误差为±0.002, 截距误差为±0.1°。
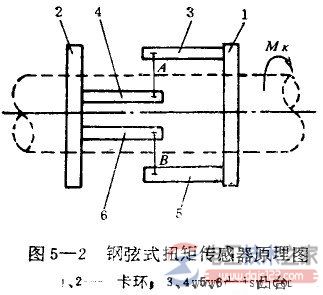
相关文章钢弦式扭矩传感器的工作原理
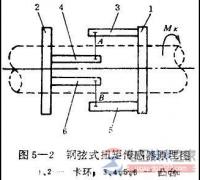
钢弦式扭矩传感器的工作原理,钢弦式扭矩传感器属非接触式计量仪器,常用于发动机传动轴扭矩的测量,钢弦的振动频率与所受外力的平方根成正比,通过测量钢弦的振动频率来确定扭矩。
时间:2021-11-10 09:32:37
微电相位差式扭矩传感器的工作原理
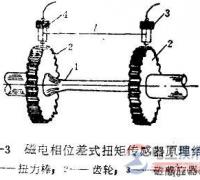
微电相位差式扭矩传感器的工作原理,磁电相位差扭矩传感器,实现了非接触测量,能测高速扭矩,还能测静态和低速的把范,将扭力标的一端锁定,另一端接被测轴依就可精确测景形态拉链值。
时间:2021-11-10 09:32:32
角度传感器工作原理与使用方法

角度传感器工作原理与使用方法,角度传感器用来检测角度的,计数与角度传感器的初始位置有关,当初始化角度传感器时,它的计数值被设置为0,角度位移传感器实例应用说明。
时间:2020-04-26 09:24:26
【图】角度传感器质量判断标准与选择方法

角度传感器质量判断标准,在选择角度传感器时,角度传感器的灵敏度越高越好,其次还要考虑角度传感器的频率响应特性、线性范围与稳定性等要素,还应对其使用环境进行调查,根据使用环境选择合适的传感器。
时间:2020-01-17 06:38:21
角度位移传感器的工作原理与应用实例

角度位移传感器的工作原理与实例,角度位移传感器利用角度变化来定位物体位置,角度传感器用来检测角度的,把角度传感器连接到马达和轮子之间的任何一根传动轴上,一定要将正确的传动比算入所读的数据。
时间:2020-01-17 06:10:24
【图】扭矩传感器的工作过程_扭矩传感器的五大特点

扭矩传感器的工作过程,扭矩传感器的五大特点,扭矩传感器的信号输出可任意选择波形─方波或脉冲波,即可测量静止扭矩,也可测量动态扭矩,一起来了解下。
时间:2015-10-12 07:56:22
【图】钢弦式扭矩传感器的组成与原理
钢弦式扭矩传感器的组成与原理,钢弦的振动频率与所受外力的平方根成正比,通过测量钢弦的振动频率来确定扭矩,测量电路采用模拟比较法,钢弦式扭矩传感器属非接触式计量仪器,常用于发动机传动轴扭矩的测量。
时间:2015-10-10 14:29:10
- 上一篇:CCD传感器与CMOS传感器的五点区别
- 下一篇:微电相位差式扭矩传感器的工作原理