温度控制PID算法的C语言程序实例代码
来源:电工天下时间:2015-10-26 07:41:46 作者:老电工手机版>>
温度控制PID算法的C语言程序实例代码
89C51单片机,通过键盘输入预设值,与DS18B20测得的实际值做比较,然后驱动制冷或加热电路。用keil C语言来实现PID的控制。
附,完整源码:
//PID算法温控C语言
#include<reg51.h>
#include<intrins.h>
#include<math.h>
#include<string.h>
struct PID {
unsigned int SetPoint; // 设定目标 Desired Value
unsigned int Proportion; // 比例常数 Proportional Const
unsigned int Integral; // 积分常数 Integral Const
unsigned int Derivative; // 微分常数 Derivative Const
unsigned int LastError; // Error[-1]
unsigned int PrevError; // Error[-2]
unsigned int SumError; // Sums of Errors
};
struct PID spid; // PID Control Structure
unsigned int rout; // PID Response (Output)
unsigned int rin; // PID Feedback (Input)
sbit data1=P1^0;
sbit clk=P1^1;
sbit plus=P2^0;
sbit subs=P2^1;
sbit stop=P2^2;
sbit output=P3^4;
sbit DQ=P3^3;
unsigned char flag,flag_1=0;
unsigned char high_time,low_time,count=0;//占空比调节参数
unsigned char set_temper=35;
unsigned char temper;
unsigned char i;
unsigned char j=0;
unsigned int s;
/******************
延时子程序,延时时间以12M晶振为准,延时时间为30us×time
******************/
void delay(unsigned char time)
{
unsigned char m,n;
for(n=0;n<time;n++)
for(m=0;m<2;m++){}
}
/******************
写一位数据子程序
******************/
void write_bit(unsigned char bitval)
{
EA=0;
DQ=0; /*拉低DQ以开始一个写时序*/
if(bitval==1)
{
_nop_();
DQ=1; /*如要写1,则将总线置高*/
}
delay(5); /*延时90us供DA18B20采样*/
DQ=1; /*释放DQ总线*/
_nop_();
_nop_();
EA=1;
}
/******************
写一字节数据子程序
******************/
void write_byte(unsigned char val)
{
unsigned char i;
unsigned char temp;
EA=0; /*关中断*/
TR0=0;
for(i=0;i<8;i++) /*写一字节数据,一次写一位*/
{
temp=val>>i; /*移位操作,将本次要写的位移到最低位*/
temp=temp&1;
write_bit(temp); /*向总线写该位*/
}
delay(7); /*延时120us后*/
// TR0=1;
EA=1; /*开中断*/
}
/******************
读一位数据子程序
******************/
unsigned char read_bit()
{
unsigned char i,value_bit;
EA=0;
DQ=0; /*拉低DQ,开始读时序*/
_nop_();
_nop_();
DQ=1; /*释放总线*/
for(i=0;i<2;i++){}
value_bit=DQ;
EA=1;
return(value_bit);
}
/******************
读一字节数据子程序
******************/
unsigned char read_byte()
{
unsigned char i,value=0;
EA=0;
for(i=0;i<8;i++)
{
if(read_bit()) /*读一字节数据,一个时序中读一次,并作移位处理*/
value|=0x01<<i;
delay(4); /*延时80us以完成此次都时序,之后再读下一数据*/
}
EA=1;
return(value);
}
/******************
复位子程序
******************/
unsigned char reset()
{
unsigned char presence;
EA=0;
DQ=0; /*拉低DQ总线开始复位*/
delay(30); /*保持低电平480us*/
DQ=1; /*释放总线*/
delay(3);
presence=DQ; /*获取应答信号*/
delay(28); /*延时以完成整个时序*/
EA=1;
return(presence); /*返回应答信号,有芯片应答返回0,无芯片则返回1*/
}
/******************
获取温度子程序
******************/
void get_temper()
{
unsigned char i,j;
do
{
i=reset(); /*复位*/
}while(i!=0); /*1为无反馈信号*/
i=0xcc; /*发送设备定位命令*/
write_byte(i);
i=0x44; /*发送开始转换命令*/
write_byte(i);
delay(180); /*延时*/
do
{
i=reset(); /*复位*/
}while(i!=0);
i=0xcc; /*设备定位*/
write_byte(i);
i=0xbe; /*读出缓冲区内容*/
write_byte(i);
j=read_byte();
i=read_byte();
i=(i<<4)&0x7f;
s=(unsigned int)(j&0x0f);
s=(s*100)/16;
j=j>>4;
temper=i|j; /*获取的温度放在temper中*/
}
/*========
Initialize PID Structure
=========*/
void PIDInit (struct PID *pp)
{
memset ( pp,0,sizeof(struct PID));
}
/*========
PID计算部分
=========*/
unsigned int PIDCalc( struct PID *pp, unsigned int NextPoint )
{
unsigned int dError,Error;
Error = pp->SetPoint - NextPoint; // 偏差
pp->SumError += Error; // 积分
dError = pp->LastError - pp->PrevError; // 当前微分
pp->PrevError = pp->LastError;
pp->LastError = Error;
return (pp->Proportion * Error//比例
+ pp->Integral * pp->SumError //积分项
+ pp->Derivative * dError); // 微分项
}
/******************
温度比较处理子程序
******************/
compare_temper()
{
unsigned char i;
if(set_temper>temper)
{
if(set_temper-temper>1)
{
high_time=100;
low_time=0;
}
else
{
for(i=0;i<10;i++)
{ get_temper();
rin = s; // Read Input
rout = PIDCalc ( &spid,rin ); // Perform PID Interation
}
if (high_time<=100)
high_time=(unsigned char)(rout/800);
else
high_time=100;
low_time= (100-high_time);
}
}
else if(set_temper<=temper)
{
if(temper-set_temper>0)
{
high_time=0;
low_time=100;
}
else
{
for(i=0;i<10;i++)
{ get_temper();
rin = s; // Read Input
rout = PIDCalc ( &spid,rin ); // Perform PID Interation
}
if (high_time<100)
high_time=(unsigned char)(rout/10000);
else
high_time=0;
low_time= (100-high_time);
}
}
// else
// {}
}
/************
T0中断服务子程序,用于控制电平的翻转 ,40us*100=4ms周期
*************/
void serve_T0() interrupt 1 using 1
{
if(++count<=(high_time))
output=1;
else if(count<=100)
{
output=0;
}
else
count=0;
TH0=0x2f;
TL0=0xe0;
}
/************
串行口中断服务程序,用于上位机通讯
*************/
void serve_sio() interrupt 4 using 2
{
/* EA=0;
RI=0;
i=SBUF;
if(i==2)
{
while(RI==0){}
RI=0;
set_temper=SBUF;
SBUF=0x02;
while(TI==0){}
TI=0;
}
else if(i==3)
{
TI=0;
SBUF=temper;
while(TI==0){}
TI=0;
}
EA=1; */
}
void disp_1(unsigned char disp_num1[6])
{
unsigned char n,a,m;
for(n=0;n<6;n++)
{
// k=disp_num1[n];
for(a=0;a<8;a++)
{
clk=0;
m=(disp_num1[n]&1);
disp_num1[n]=disp_num1[n]>>1;
if(m==1)
data1=1;
else
data1=0;
_nop_();
clk=1;
_nop_();
}
}
}
/************
显示子程序
功能:将占空比温度转化为单个字符,显示占空比和测得到的温度
*************/
void display()
{
unsigned char code number[]={0xfc,0x60,0xda,0xf2,0x66,0xb6,0xbe,0xe0,0xfe,0xf6};
unsigned char disp_num[6];
unsigned int k,k1;
k=high_time;
k=k%1000;
k1=k/100;
if(k1==0)
disp_num[0]=0;
else
disp_num[0]=0x60;
k=k%100;
disp_num[1]=number[k/10];
disp_num[2]=number[k%10];
k=temper;
k=k%100;
disp_num[3]=number[k/10];
disp_num[4]=number[k%10]+1;
disp_num[5]=number[s/10];
disp_1(disp_num);
}
/******************
主程序
******************/
main()
{
unsigned char z;
unsigned char a,b,flag_2=1,count1=0;
unsigned char phil[]={2,0xce,0x6e,0x60,0x1c,2};
TMOD=0x21;
TH0=0x2f;
TL0=0x40;
SCON=0x50;
PCON=0x00;
TH1=0xfd;
TL1=0xfd;
PS=1;
EA=1;
EX1=0;
ET0=1;
ES=1;
TR0=1;
TR1=1;
high_time=50;
low_time=50;
PIDInit ( &spid ); // Initialize Structure
spid.Proportion = 10; // Set PID Coefficients
spid.Integral = 8;
spid.Derivative =6;
spid.SetPoint = 100; // Set PID Setpoint
while(1)
{
if(plus==0)
{
EA=0;
for(a=0;a<5;a++)
for(b=0;b<102;b++){}
if(plus==0)
{
set_temper++;
flag=0;
}
}
else if(subs==0)
{
for(a=0;a<5;a++)
for(b=0;a<102;b++){}
if(subs==0)
{
set_temper--;
flag=0;
}
}
else if(stop==0)
{
for(a=0;a<5;a++)
for(b=0;b<102;b++){}
if(stop==0)
{
flag=0;
break;
}
EA=1;
}
get_temper();
b=temper;
if(flag_2==1)
a=b;
if((abs(a-b))>5)
temper=a;
else
temper=b;
a=temper;
flag_2=0;
if(++count1>30)
{
display();
count1=0;
}
compare_temper();
}
TR0=0;
z=1;
while(1)
{
EA=0;
if(stop==0)
{
for(a=0;a<5;a++)
for(b=0;b<102;b++){}
if(stop==0)
disp_1(phil);
// break;
}
EA=1;
}
}
//DS18b20 子程序
#include <REG52.H>
sbit DQ=P2^1; //定义端口
typedef unsigned char byte;
typedef unsigned int word;
//延时
void delay(word useconds)
{
for(;useconds>0;useconds--);
}
//复位
byte ow_reset(void)
{
byte presence;
DQ=0; //DQ低电平
delay(29); //480us
DQ=1; //DQ高电平
delay(3); //等待
presence=DQ; //presence信号
delay(25);
return(presence);
} //0允许,1禁止
//从1-wire 总线上读取一个字节
byte read_byte(viod)
{
byte i;
byte value=0;
for (i=8;i>0;i--)
{
value>>=1;
DQ=0;
DQ=1;
delay(1);
if(DQ)value|=0x80;
delay(6);
}
return(value);
}
//向1-wire总线上写一个字节
void write_byte(char val)
{
byte i;
for (i=8;i>0;i--) //一次写一个字节
{
DQ=0;
DQ=val&0x01;
delay(5);
DQ=1;
val=val/2;
}
delay(5);
}
//读取温度
char Read_Temperature(void)
{
union{
byte c[2];
int x;
}temp;
ow_reset();
write_byte(0xcc);
write_byte(0xBE);
temp.c[1]=read_byte();
temp.c[0]=read_byte();
ow_reset();
write_byte(0xCC);
write_byte(0x44);
return temp.x/2;
}
相关文章学习PLC需要先学习继电器控制吗?
在学习PLC基础知识之前,是否需要先学习继电器控制,能够问出这个问题的人,在学习下算是比较用的了,答案是肯定的,最好先学习下继电器控制方面的知识,下面具体来了解下。
时间:2022-07-17 05:26:08
将继电器控制电路转换为plc梯形图的方法
继电器控制电路转换为plc梯形图的方法,需要用plc的外部接线图和梯形图来等效继电器电路图,根据继电器电路图设计梯形图,将继电器电路图转换为具有相同功能的plc外部硬件接线图和梯形图。
时间:2022-07-11 08:50:25
plc梯形图实现路灯延时触模开关控制
分享一个路灯延时触模开关控制的plc梯形图程序,plc梯形图实现路灯的延时开关,这在很多路灯控制场合经常会用到,配有实例图,供大家学习参考。
时间:2022-07-10 07:15:52
电工必备电气原理图14:PLC正反转控制原理
以下是PLC正反转控制的工作原理图,通过PLC编程实现电动机的正向启动、反向启动和停止,以下是简单而实用的电气原理图,有需要的朋友参考下。
时间:2022-03-28 09:17:14
电工必备电气原理图1:自动往返控制工作原理图
电工必备电气原理图1:自动往返控制工作原理图,完整动画演示,从原理上了解自动往返控制的工作过程,有需要的朋友参考下。
时间:2022-03-11 15:35:32
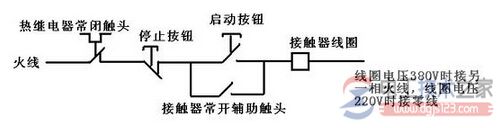
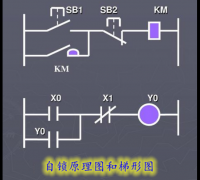
plc自锁控制梯形图与指令表程序的二种方式
plc自锁控制梯形图与指令表程序的二种方式,包括启动按钮、停止按钮、热保护、运行继电器等,学习下plc自锁控制梯形图与指令表程序的编写方法。
时间:2021-11-22 09:20:06
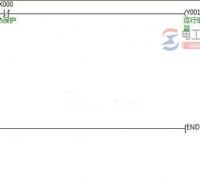
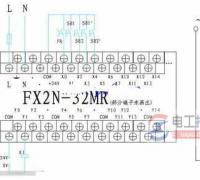
plc自锁控制原理图(FX2N-32MR)
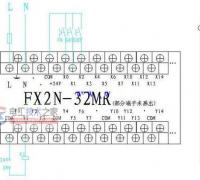
有关plc自锁控制的原理图,型号为FX2N-32MR,分享给大家,做个参考。
时间:2021-11-22 09:20:05
两地控制的plc电气原理图
分享一个两地控制的plc电气原理图,学习下利用plc电气原理实现两地控制的操作方法,感兴趣的朋友参考下。
时间:2021-11-22 09:19:45
- 上一篇:plc温度控制与PID算法的实例教程
- 下一篇:【图】温度PID控制接线与编程实例