plc步进电机控制实例说明
来源:电工天下时间:2020-02-20 09:17:28 作者:老电工手机版>>
有关plc步进电机控制的例子,采用绝对位置控制指令(drva),fx1s控制步进电机的方法,x0闭合动作到a点停止,x1闭合动作到b点停止。
plc控制步进电机的例子
采用绝对位置控制指令(drva),大致阐述fx1s控制步进电机的方法。
fx系列plc单元能同时输出两组100khz脉冲,是低成本控制伺服与步进电机的较好选择!
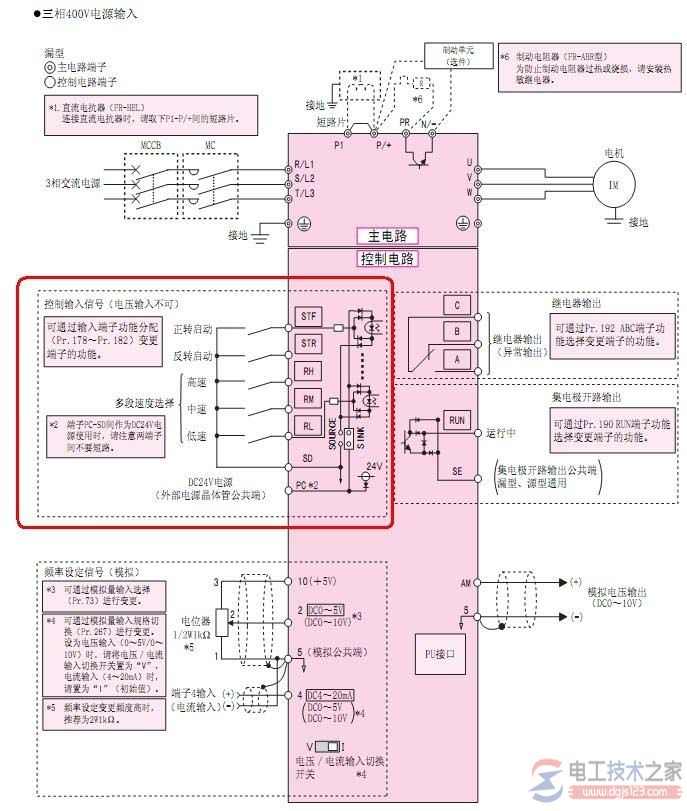
ls+,pls-为步进驱动器的脉冲信号端子,dir+,dir-为步进驱动器的方向信号端子。
所谓绝对位置控制(drva),就是指定要走到距离原点的位置,原点位置数据存放于32位寄存器d8140里。当机械位于设定的原点位置时用程序把d8140的值清零,也就确定了原点的位置。
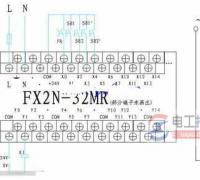
实例动作方式:x0闭合动作到a点停止,x1闭合动作到b点停止,接线图与动作位置示例如左图(距离用脉冲数表示)。
程序:(此程序只为说明用,实用需改善。)
说明:
在原点时将d8140的值清零(本程序中没有做此功能)
32位寄存器d8140是存放y0的输出脉冲数,正转时增加,反转时减少。
当正转动作到a点时,d8140的值是3000。此时闭合x1,机械反转动作到b点,也就是-3000的位置。d8140的值就是-3000。
当机械从a点向b点动作过程中,x1断开(如在c点断开)则d8140的值就是200,此时再闭合x0,机械正转动作到a点停止。
当机械停在a点时,再闭合x0,因为机械已经在距离原点3000的位置上,故而机械没有动作!
把程序中的绝对位置指令(drva)换成相对位置指令(drvi):
当机械在b点时(假设此时d8140的值是-3000)闭合x0,则机械正转3000个脉冲停止,也就是停在了原点。d8140的值为0
当机械在b点时(假设此时d8140的值是-3000)闭合x1,则机械反转3000个脉冲停止,也就是停在了左边距离b点3000的位置(图中未画出),d8140的值为-6000。
一般两相步进电机驱动器端子示意图:
free+,free-:脱机信号,步进电机的没有脉冲信号输入时具有自锁功能,也就是锁住转子不动。而当有脱机信号时解除自锁功能,转子处于自由状态并且不响应步进脉冲。
v+,gnd:为驱动器直流电源端子,也有交流供电类型。
a+,a-,b+,b-分别接步进电机的两相线圈
相关文章学习PLC需要先学习继电器控制吗?
在学习PLC基础知识之前,是否需要先学习继电器控制,能够问出这个问题的人,在学习下算是比较用的了,答案是肯定的,最好先学习下继电器控制方面的知识,下面具体来了解下。
时间:2022-07-17 05:26:08
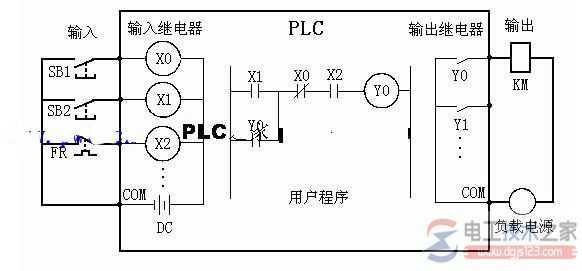
将继电器控制电路转换为plc梯形图的方法
继电器控制电路转换为plc梯形图的方法,需要用plc的外部接线图和梯形图来等效继电器电路图,根据继电器电路图设计梯形图,将继电器电路图转换为具有相同功能的plc外部硬件接线图和梯形图。
时间:2022-07-11 08:50:25
plc梯形图实现路灯延时触模开关控制
分享一个路灯延时触模开关控制的plc梯形图程序,plc梯形图实现路灯的延时开关,这在很多路灯控制场合经常会用到,配有实例图,供大家学习参考。
时间:2022-07-10 07:15:52
电工必备电气原理图14:PLC正反转控制原理
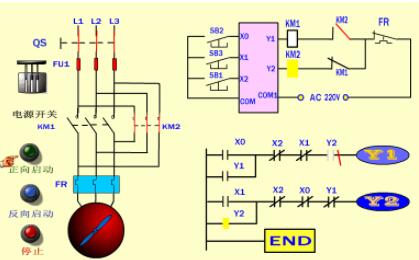
以下是PLC正反转控制的工作原理图,通过PLC编程实现电动机的正向启动、反向启动和停止,以下是简单而实用的电气原理图,有需要的朋友参考下。
时间:2022-03-28 09:17:14
电工必备电气原理图1:自动往返控制工作原理图
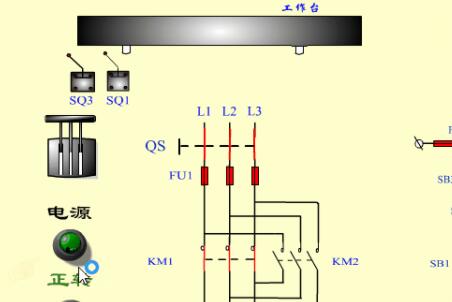
电工必备电气原理图1:自动往返控制工作原理图,完整动画演示,从原理上了解自动往返控制的工作过程,有需要的朋友参考下。
时间:2022-03-11 15:35:32
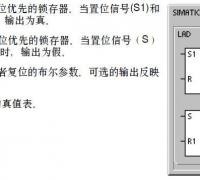
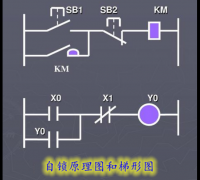
plc自锁控制梯形图与指令表程序的二种方式
plc自锁控制梯形图与指令表程序的二种方式,包括启动按钮、停止按钮、热保护、运行继电器等,学习下plc自锁控制梯形图与指令表程序的编写方法。
时间:2021-11-22 09:20:06
plc自锁控制原理图(FX2N-32MR)
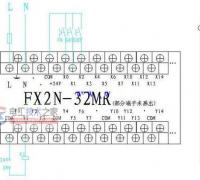
有关plc自锁控制的原理图,型号为FX2N-32MR,分享给大家,做个参考。
时间:2021-11-22 09:20:05
两地控制的plc电气原理图
分享一个两地控制的plc电气原理图,学习下利用plc电气原理实现两地控制的操作方法,感兴趣的朋友参考下。
时间:2021-11-22 09:19:45
- 上一篇:plc应用领域与工作环境要求
- 下一篇:plc各接口形式编程电缆的制作方法